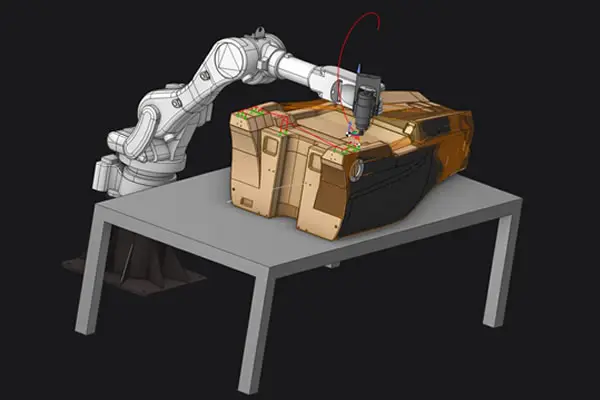
Проектирование ячеек с промышленными роботами в средах K-Roset, SprutCam.
Разработка управляющих программ для роботов, отладка в CAM системах и на экспериментальных роботах в лаборатории
Настройка сетевого взаимодействия внутри ячеек с промышленными роботами и периферией
Разработка технической документации в соответствии с ЕСКД.
Анализ и формулировка предложений по закупкам
Монтажные и пусконаладочные работы робототехнических комплексов и отдельных решений под ключ
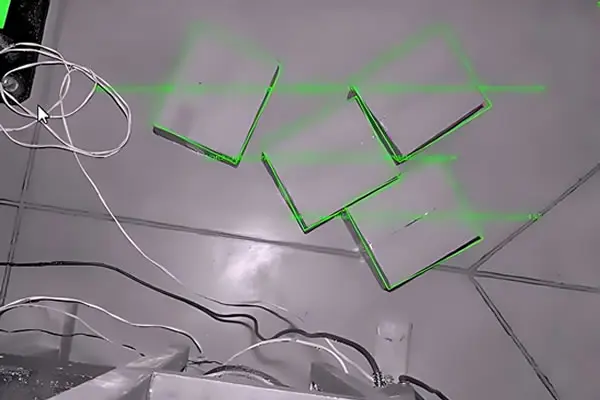
Техническое зрение
Интеграция элементов технического зрения в состав робототехнического комплекса на основе смарт камер, камер глубины, лидаров и сканеров
Настройка взаимодействия элементов технического зрения с роботами
Комплексирование элементов технического зрения с нейросетями, с помощью технологий: NumPy, Matploilib, Tensorflow, OpenCV, Yolov, Pandas)
Встраиваемые системы
Разработка решений на базе микроконтроллеров STM32, AVR и подобных
Интеграция и настройка работы датчиков
Реализация конструкторских и программно-технических решений на основе самостоятельно разрабатываемых электронных модулей.
Разработка и интеграция автоматизированных рабочих мест операторов
Интеграция ПЛК в решения
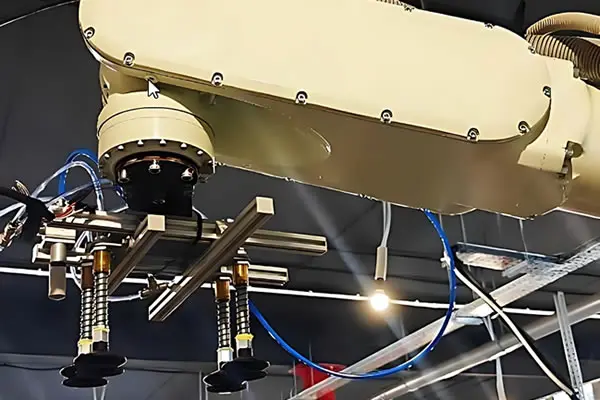
Оснастка для роботов
Ввод в эксплуатацию роботизированной сварки, интеграция оборудования для роботизированной лазерной или механической обработки, разработка робототехнических комплексов для задач укладки
Разработка оснастки, адаптация роботов для работы со станками ЧПУ
Испытания и отладка разработанной оснастки
САМ системы и постпроцессирование
Разработка постпроцессоров для роботов/станков по спецификациям в форматe dll, в форматах под соответствующее ПО (SprutCAM, SolidCAM), тестирование, отладка